Stay up to date with our vehicle development and outreach activities throughout the 2025–26 acedemic year! Beyond our technical work, we value collaboration across Carnegie Mellon University and are committed to STEM outreach and mentorship throughout the greater Pittsburgh community. Follow us on LinkedIn for updates or on Instagram for a more behind-the-scenes look at our team.













April 24, 2026
We had the opportunity to connect with two robotics clubs at the University of Pittsburgh: Pittsburgh Electric Propulsion and Robotics Automation Society at Pitt. On Carnegie Mellon’s campus, we toured the Search-based Planning Lab, the Kantor Lab for Agriculture and Forestry, and the Robotic Caregiving and Human Interaction Lab. On the University of Pittsburgh's campus, we visited the ENIGMA Lab for bio-inspired robot navigation and the Space, High-Performance & Resilient Computing Lab. We also had the chance to see what these student groups have been working on, and share our work on our AUV! These lab tours gave us insight into cutting-edge research in robotics, autonomy, and computing. A special thank you to Hayden Feddock and Olivia Sobek for organizing these visits, and to the professors and students who took the time to share their work with us.


April 15, 2026
With access to Carnegie Mellon’s newly built Carnegie Mellon University Robotics Innovation Center, we’re grateful for the opportunity to test in such an advanced facility! We were also excited to be featured in an article during the ribbon-cutting celebration of the new RIC, highlighting the innovative work happening across CMU Robotics Institute. As we prepare for the upcoming 2026 RoboSub competition in July, we’ve been able to test our vehicle, Osprey, in the RIC water tank. The sheer size of this tank makes it the perfect environment to fine-tune underwater controls. We're excited to keep testing in the last few weeks of the academic semester!


March 20, 2026
We had a great time hosting our GTC keynote watch party with CMU’s Roboclub! Watching Jensen Huang highlight the latest advancements in robotics and AI made the experience especially inspiring. A huge thank you to everyone from Roboclub who joined us, and a shoutout to the NVIDIA representatives for their support in making this event possible. We look forward to more collaboration and events like this in the future!
January 17, 2026
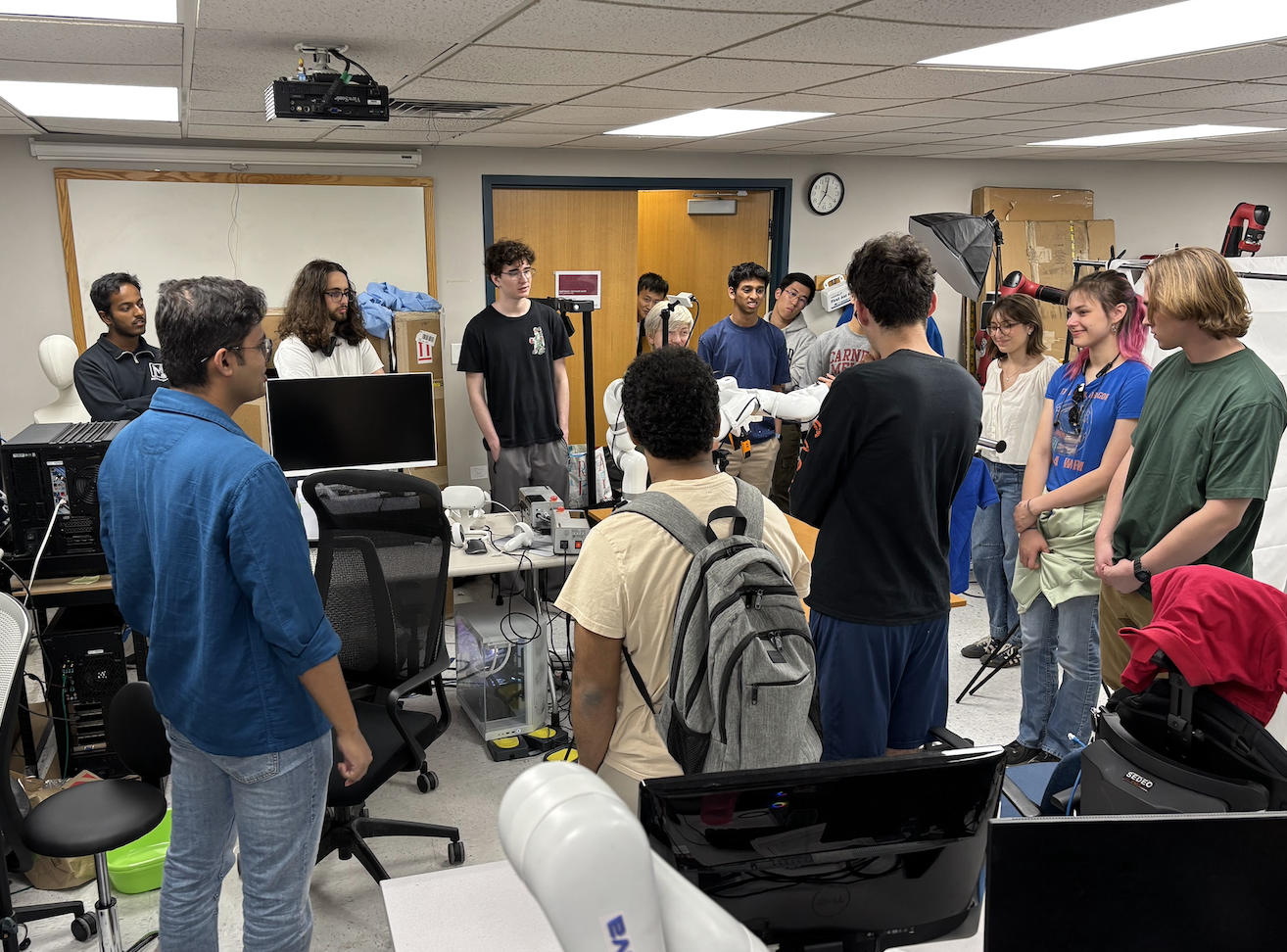
Our team was excited to welcome FIRST LEGO League Team Steel Synapse from Upper St. Clair. This innovative group of 7th graders shared their ideas for using drones to tackle archaeological challenges, including a soil-sampling system designed to determine whether excavation sites are worth further exploration. We had a great time offering tips on robot-building best practices, showcasing our AUV, and answering their questions as they explored our workspace. We’re grateful for the opportunity to connect with the Pittsburgh youth robotics community, and we wish Team Steel Synapse the best of luck at their competition this February!



September 8, September 17, 2025 & March 26, 2026
We’ve enjoyed opportunities to connect with employers, learn more about their companies, and compare their industry work to the challenges we tackle through RoboSub. Over the past fall and spring semesters, we were proud to host recruitment events and meetings with Anduril Industries, Blue Origin, and Milwaukee Tool.


September 13, 2025
As we approach the end of the Fall 2025 semester, we wanted to reflect on the meaningful community engagement we’ve had across Carnegie Mellon University. At the beginning of the semester, we participated in the First-Year Orientation Community Showcase, where we welcomed a new group of aspiring engineers to information sessions and onboarding. Our current members and alumni led a series of open software workshops, covering topics such as state estimation, robotics controls, computer vision, and using the ROS framework. We’re grateful for the support and enthusiasm from our teammates and everyone who contributed to these events. Looking ahead to the Spring semester, we’re excited to continue fostering a strong robotics community for undergraduate students at Carnegie Mellon University.
May 1, 2026
Goal: Calibrate OAK-D camera
For more accurate underwater perception, we calibrated our OAK-D camera using a small calibration board held steady. By capturing images of the board from different positions, we were able to account for lens distortion introduced by the water and enclosure. This process improves the accuracy of depth estimation and visual measurements, helping our robot better interpret its underwater environment.

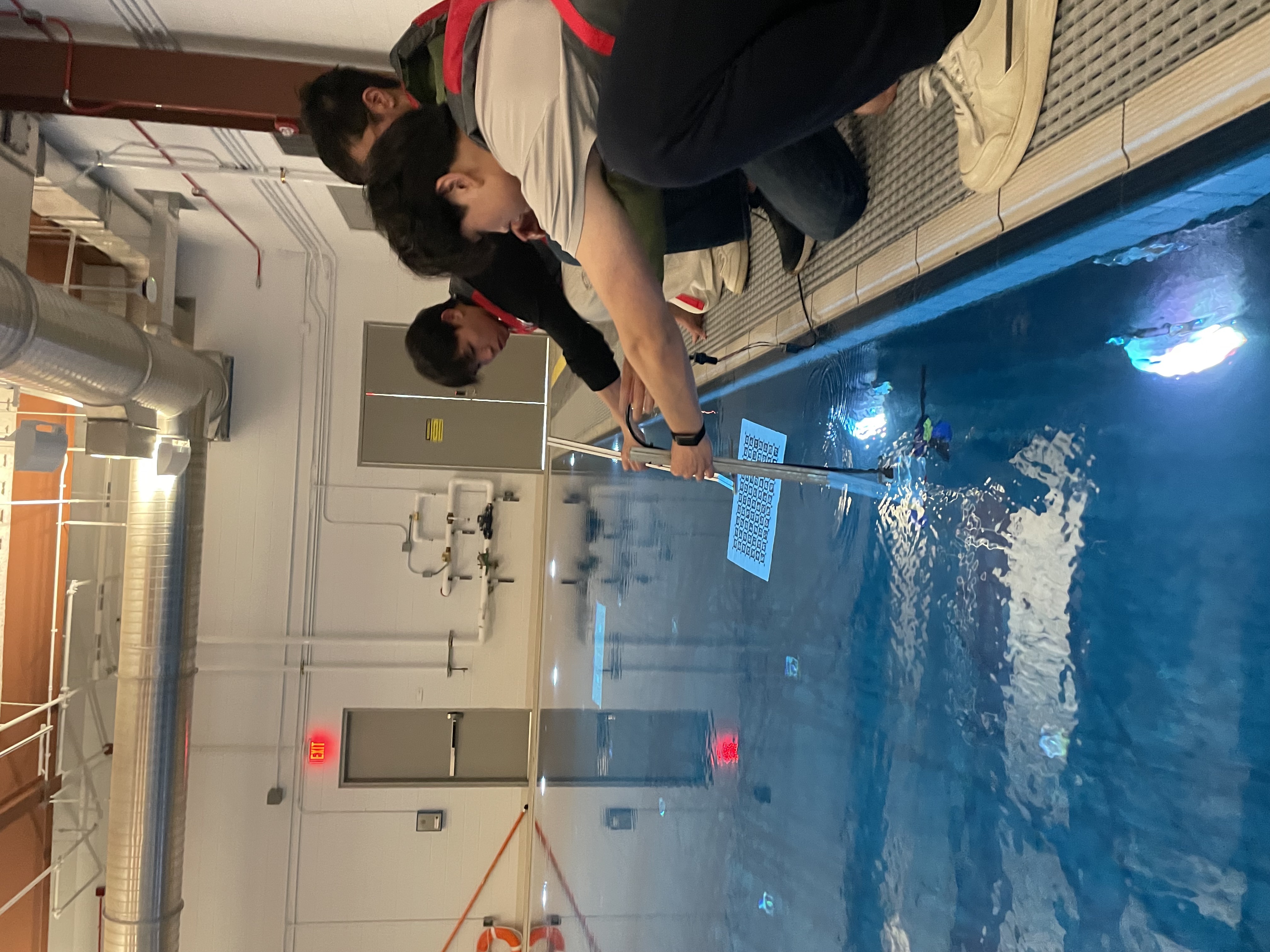
March 20, 2026
Goal: Tune Controls
During this water test (and many water tests afterwards), we focused on validating and tuning Osprey’s control systems. By testing maneuvers such as depth holding, we were able to evaluate how the robot responded to sensor feedback and thruster commands.

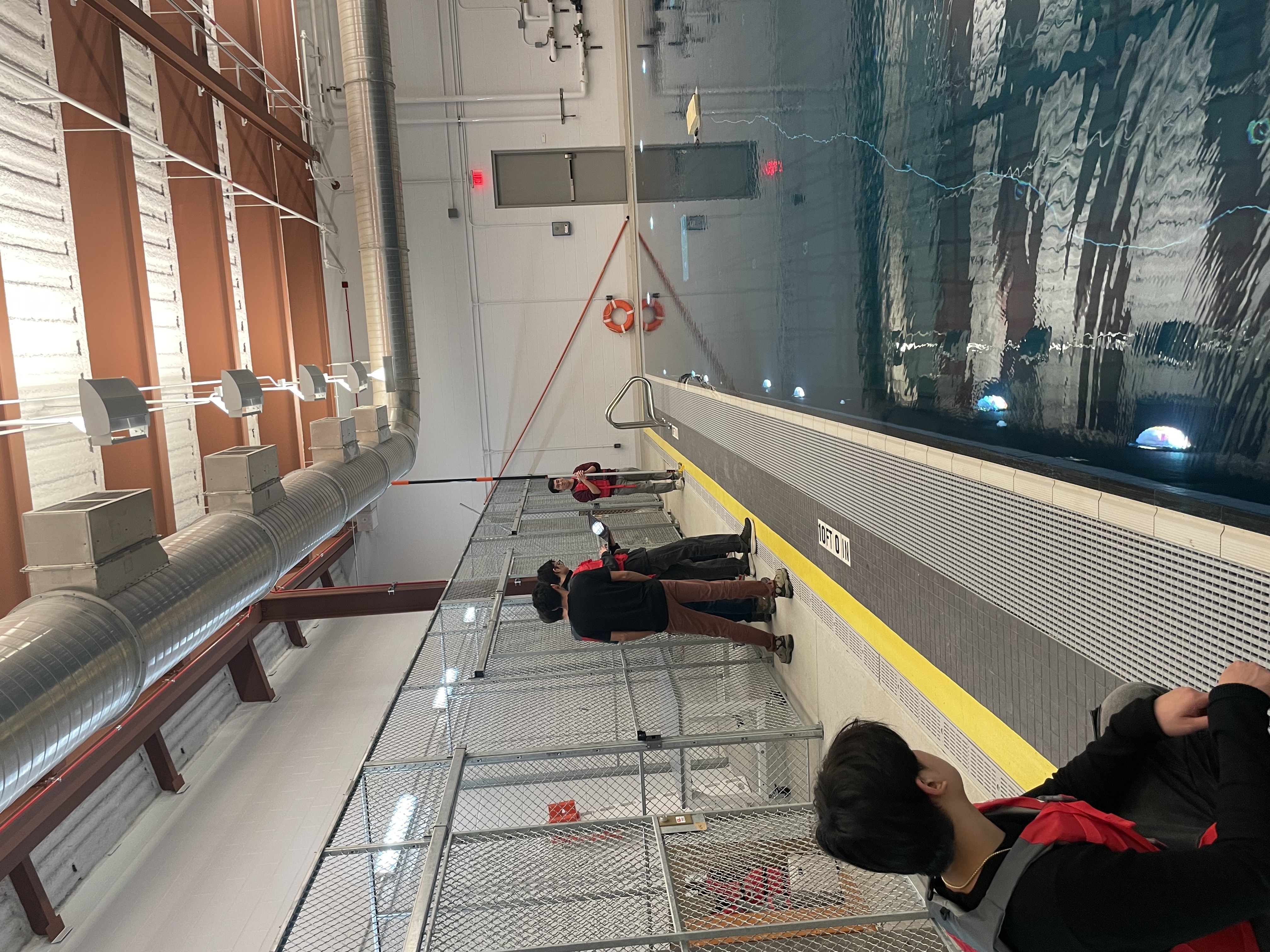
February 13, 2026
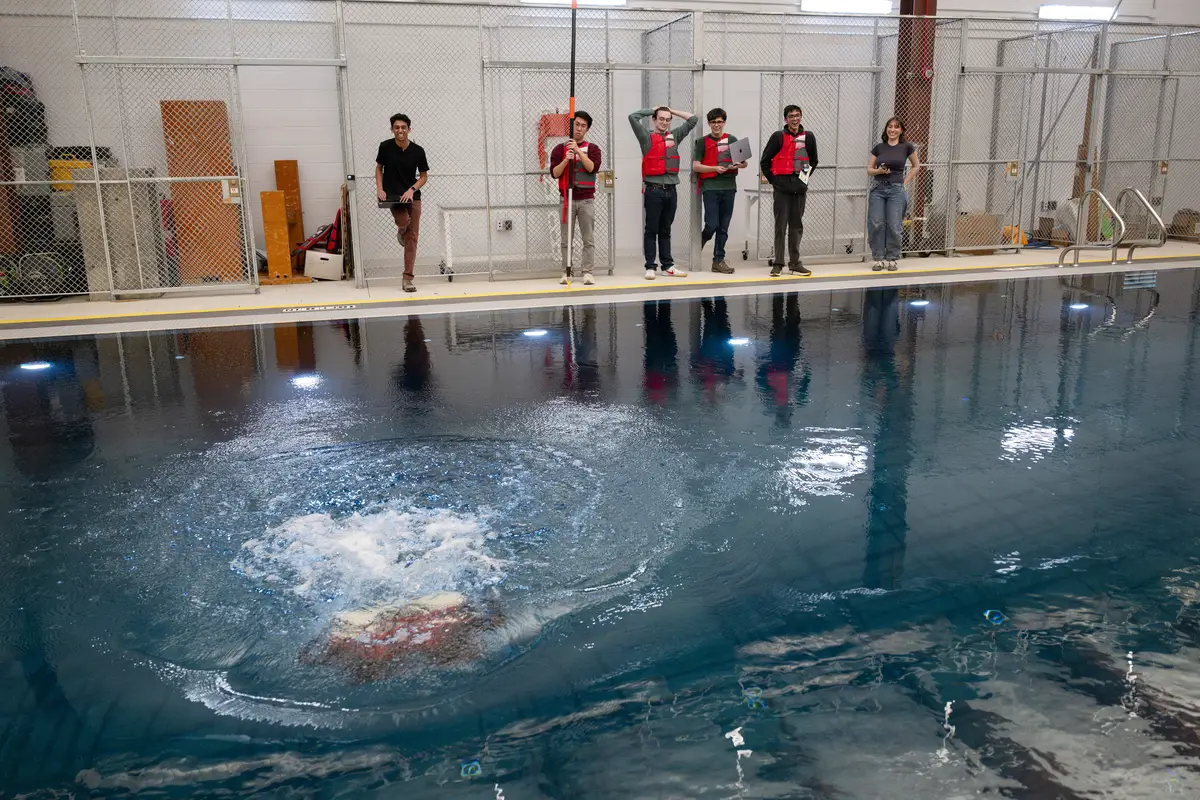
Goal: Initial Controls & Sensor Validation
This was our first time dropping Osprey in this massive tank in CMU’s Robotics Innovation Center. Fully tethered, we collected sensor data and observed how Osprey responded to thruster commands in this large-scale environment. We wanted to validate controls and tune real-world behavior before going fully autonomous. Using a GoPro, we were able to capture some really exciting footage as well!
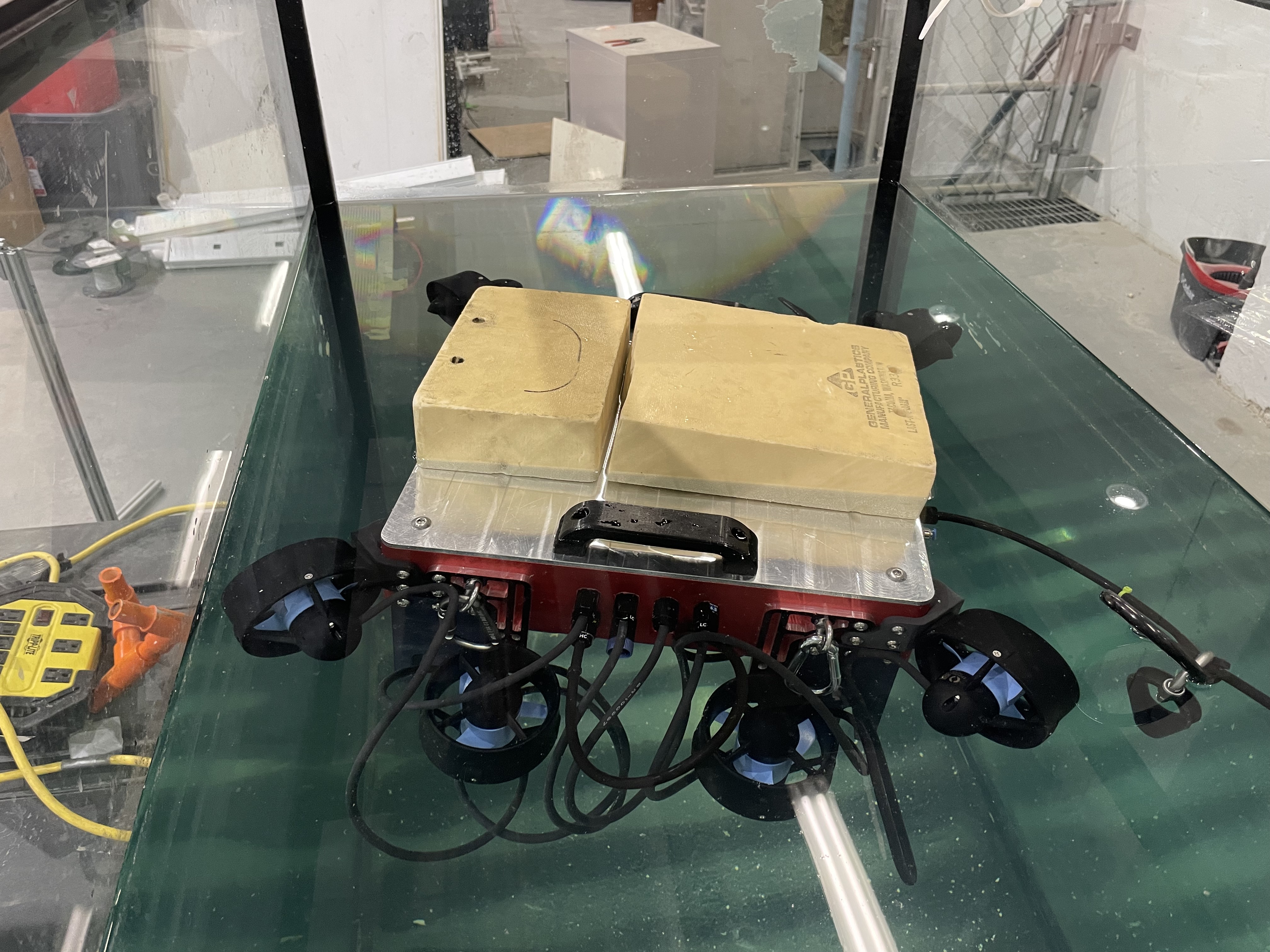
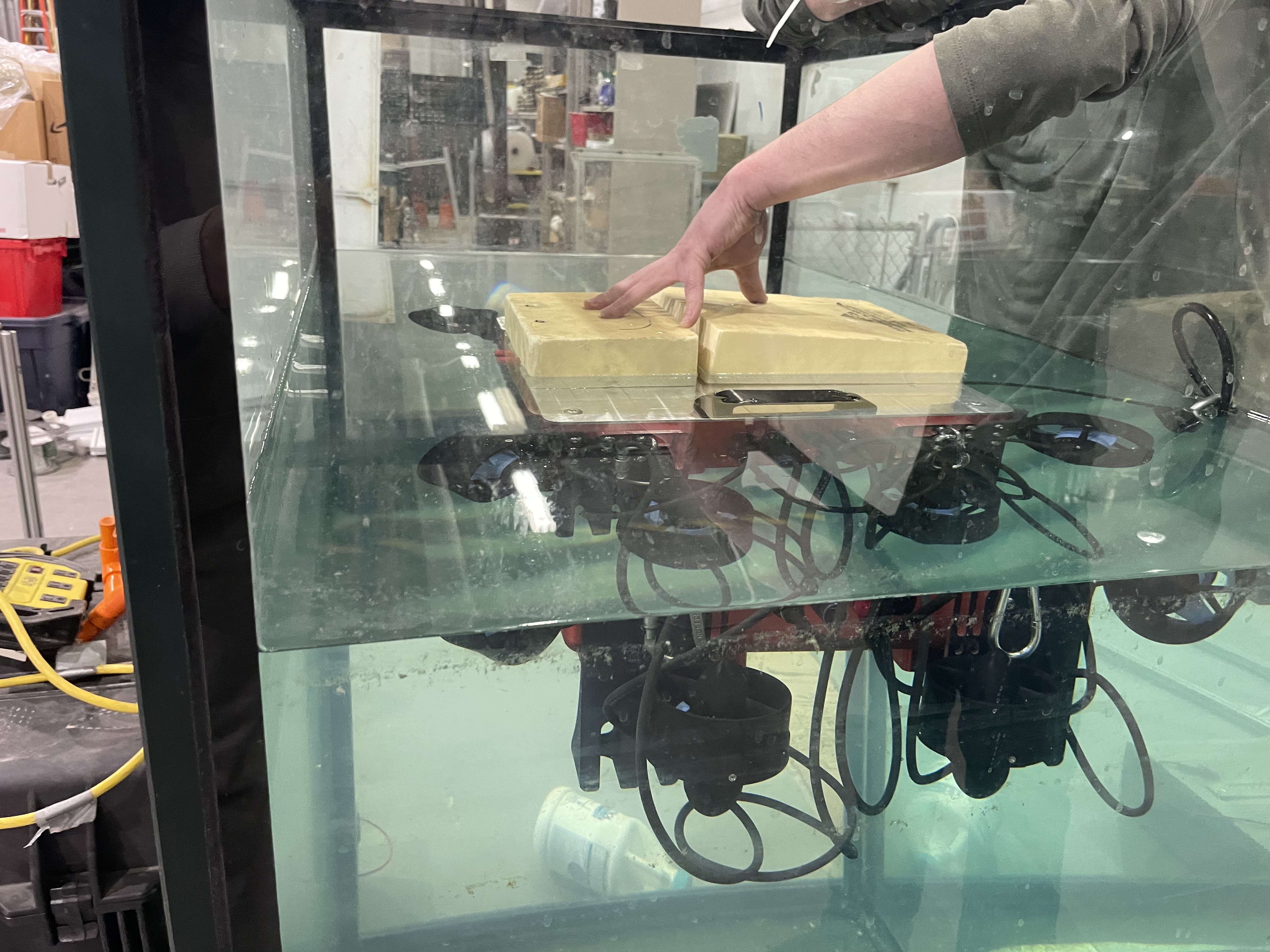
February 12, 2026
Goal: Leak Checks & Thruster Testing
The night before our first water test, we dunked Osprey in a small, roughly 5×3 foot tank for a quick system check. We wanted to make sure our vehicle had no leaks, make sure our buoyancy looked okay, and tested thrusters and their speeds before testing in the large-scale water tank.
August 4, 2024
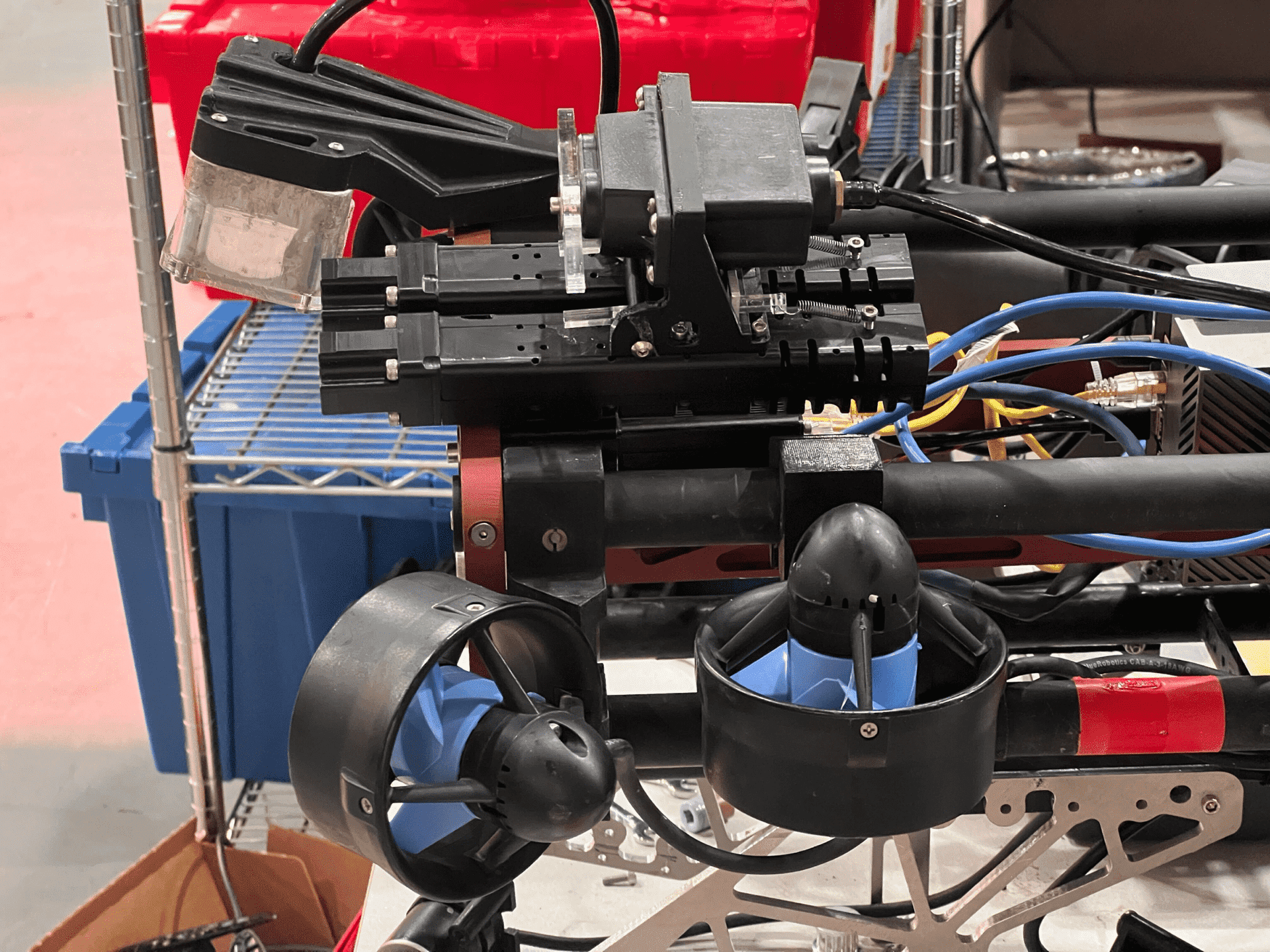
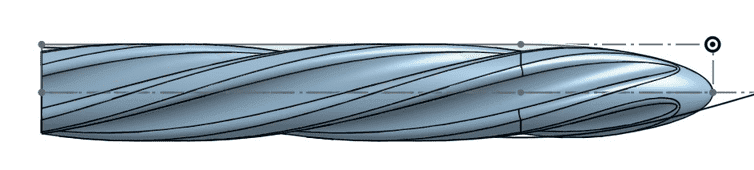
We've improved our previous magnet and servo driven torpedo launcher with a powerful spring and servo design. After some R&D on optimal torpedo design, we've made improvements to the torpedo itself to travel farther and faster while still being able to recover the torpedo post-operation.
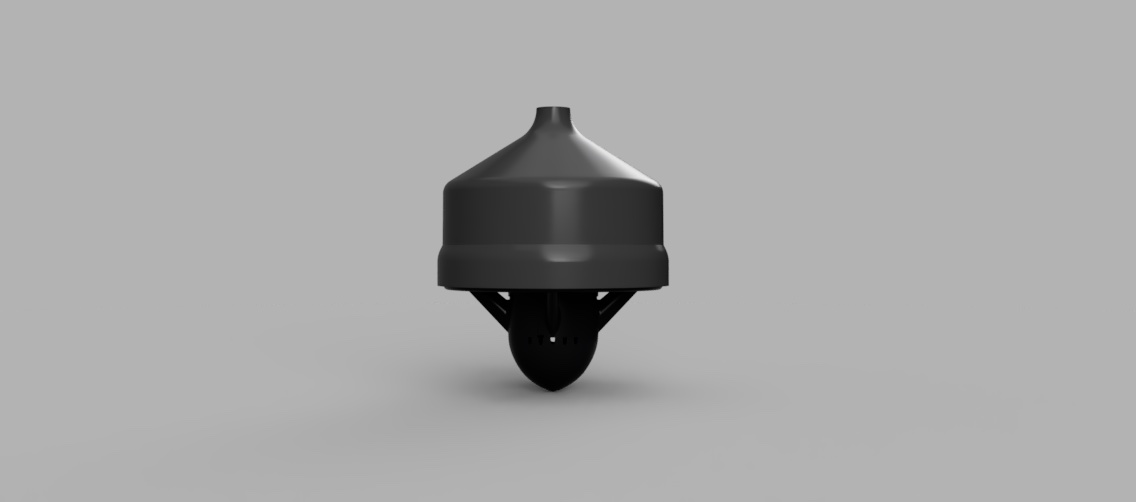
July 14, 2024
We have added a new mechanical system to the family! Say hello to the Sphincter, the bio-inspired gripper system. The human body has over 60 types of sphincters in the body whose primary function is to allow or restrict substances to flow through a passageway. We aimed to replicate and repurpose this concept to be able to close in and grip onto an object, rendering it immobile.

July 14, 2024
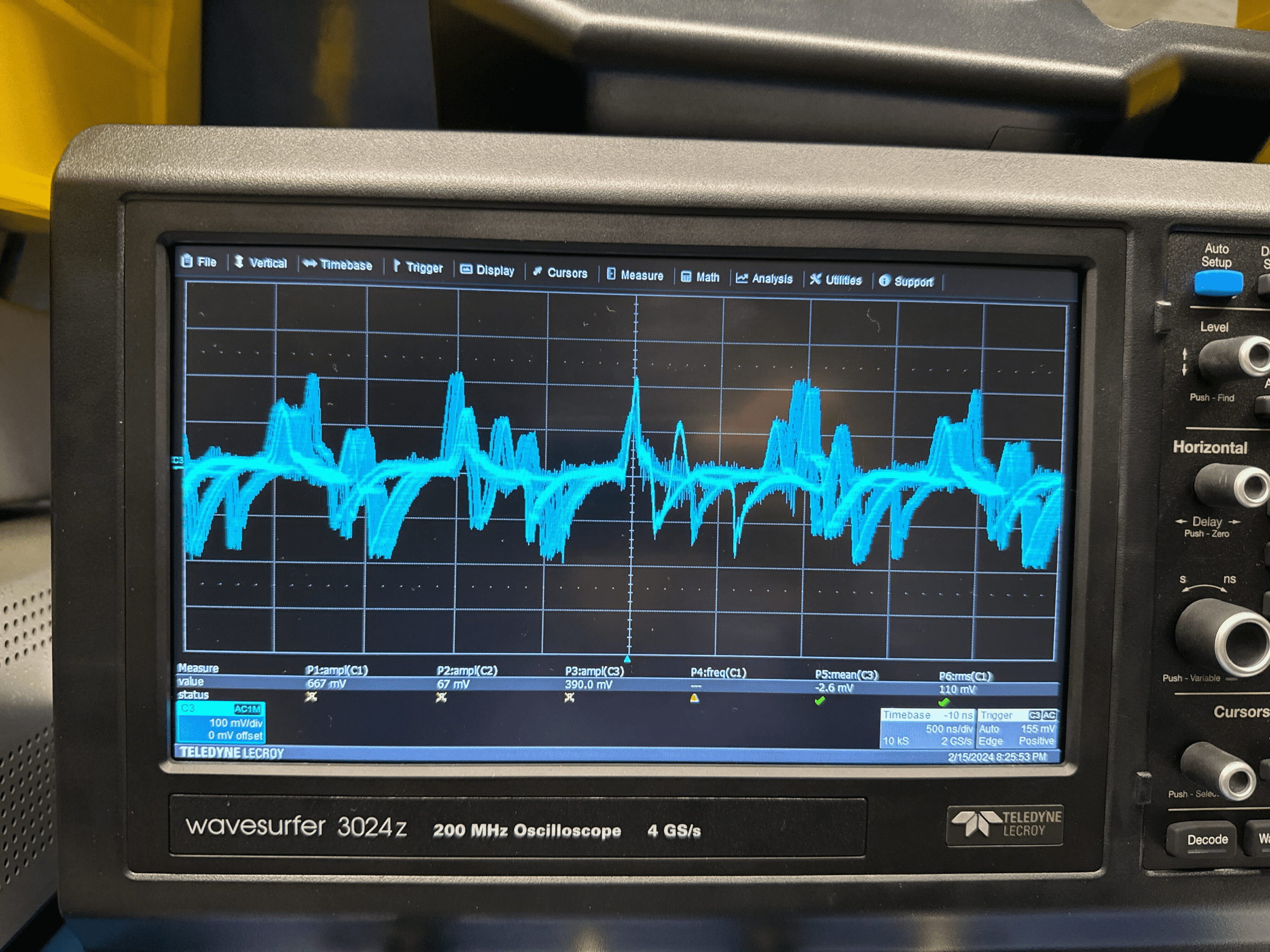
We have made improvements to our workbench featuring a new monitor, organizational shelves, and Teledyne LeCroy sponsored oscilloscope! Big thanks to our sponsors who have supported us in growing our team!
July 14, 2024
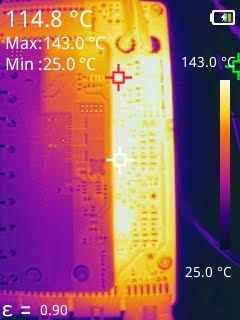
We've upgraded our electronics in order to handle demanding software and mechanical tasks. So what does that mean? More heat! We have designed a custom thermal plate that replaces our acrylic endcap to assist with flushing heat out of the sub.
July 14, 2024
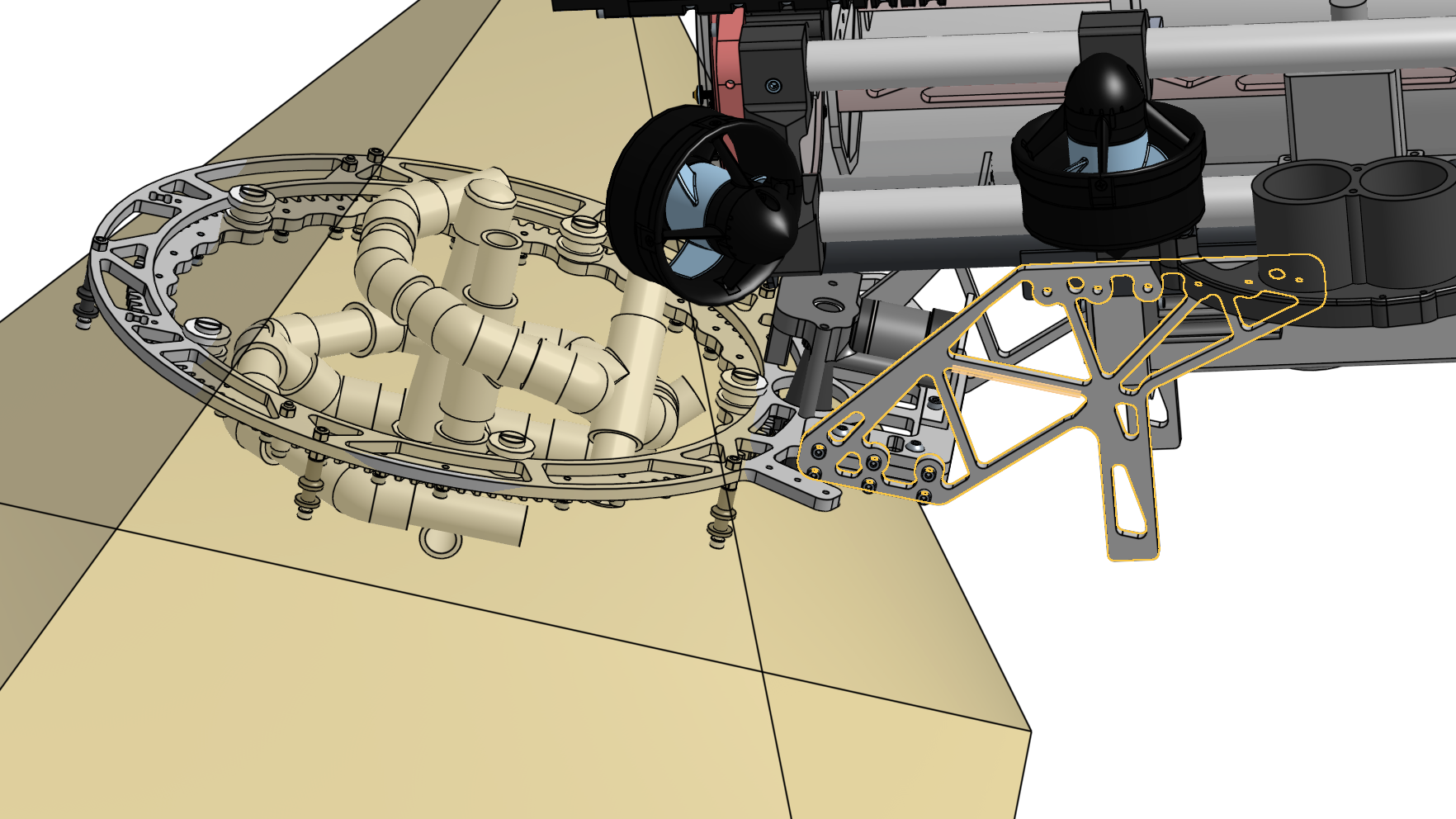
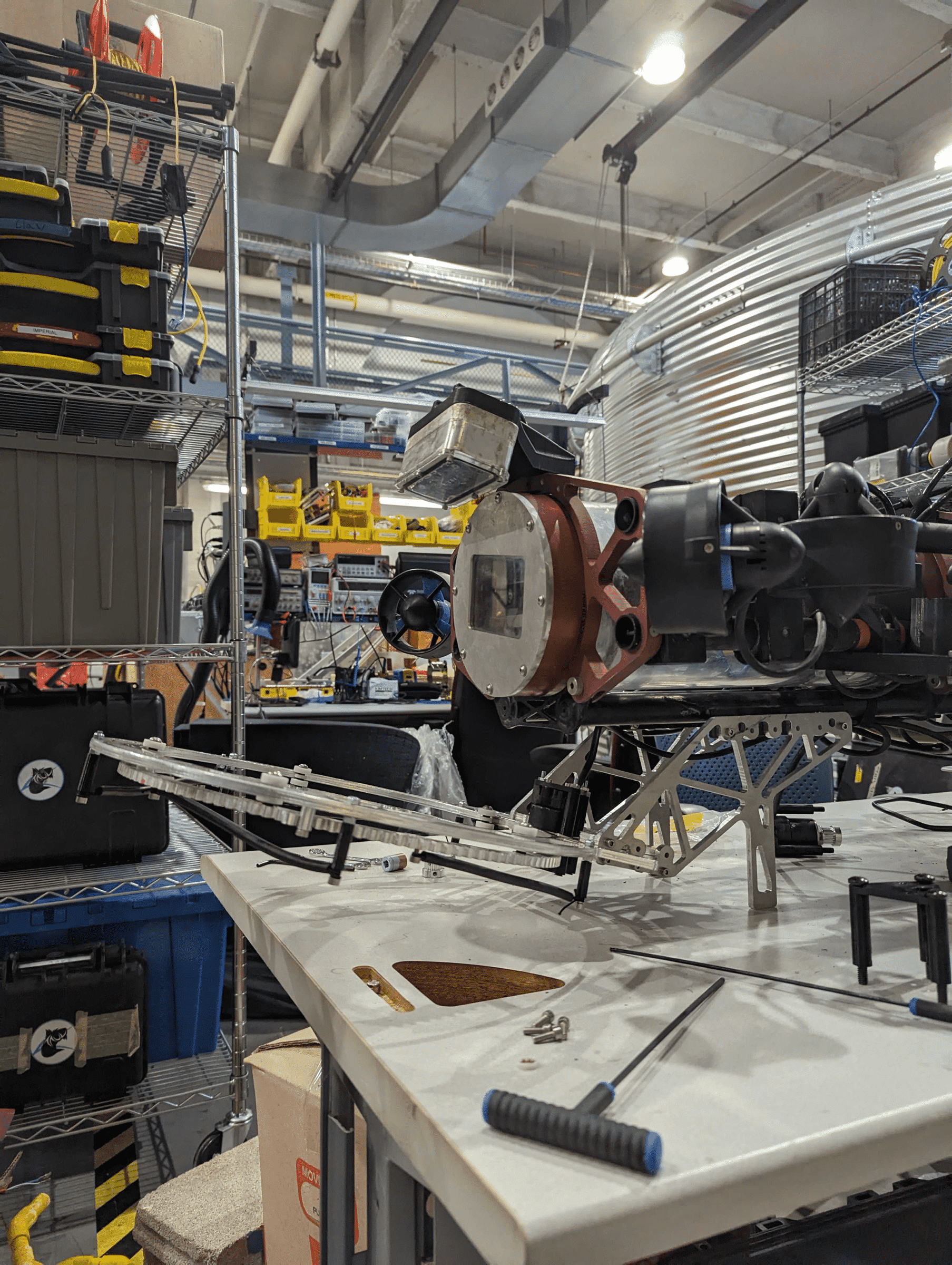
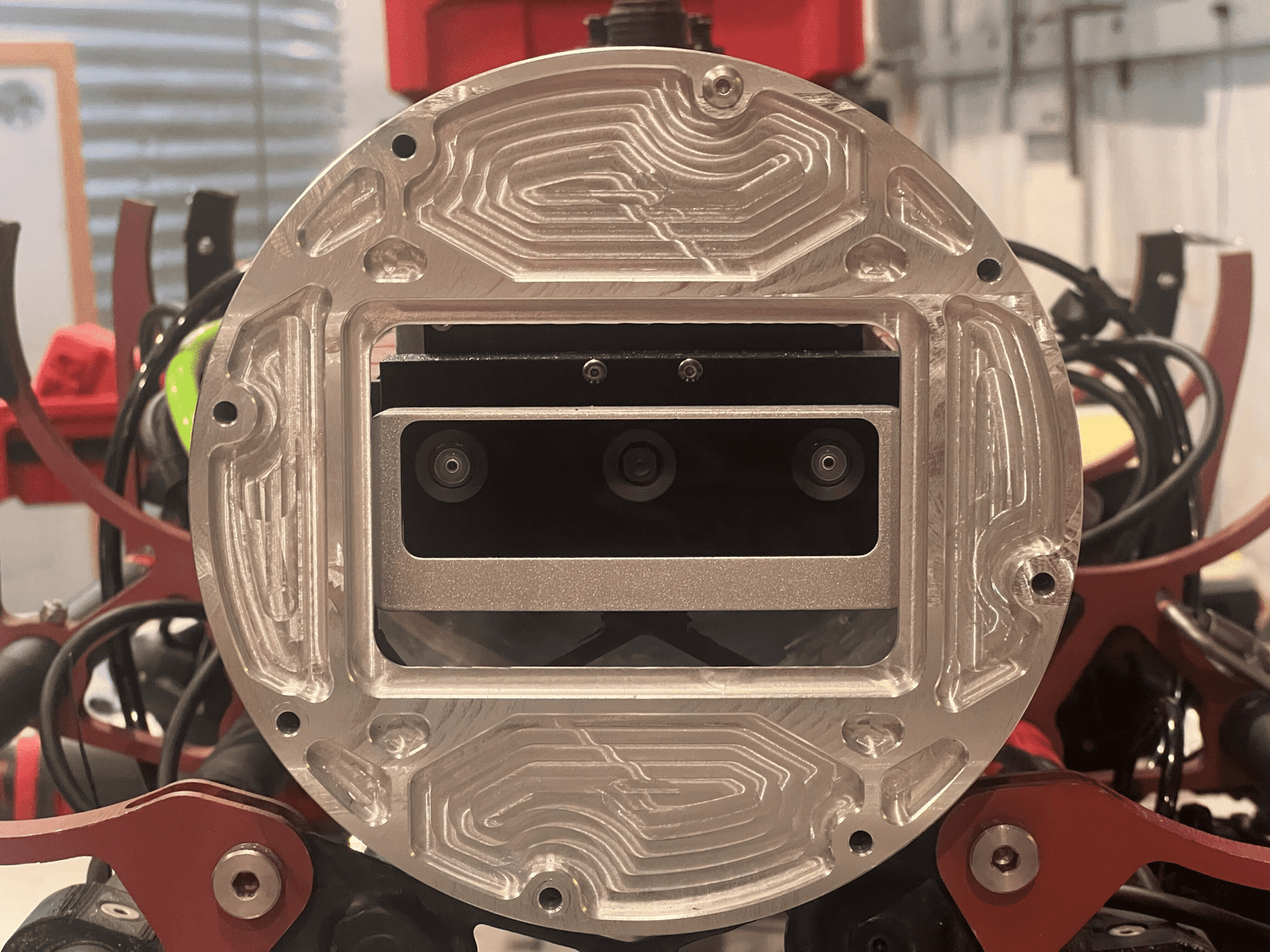
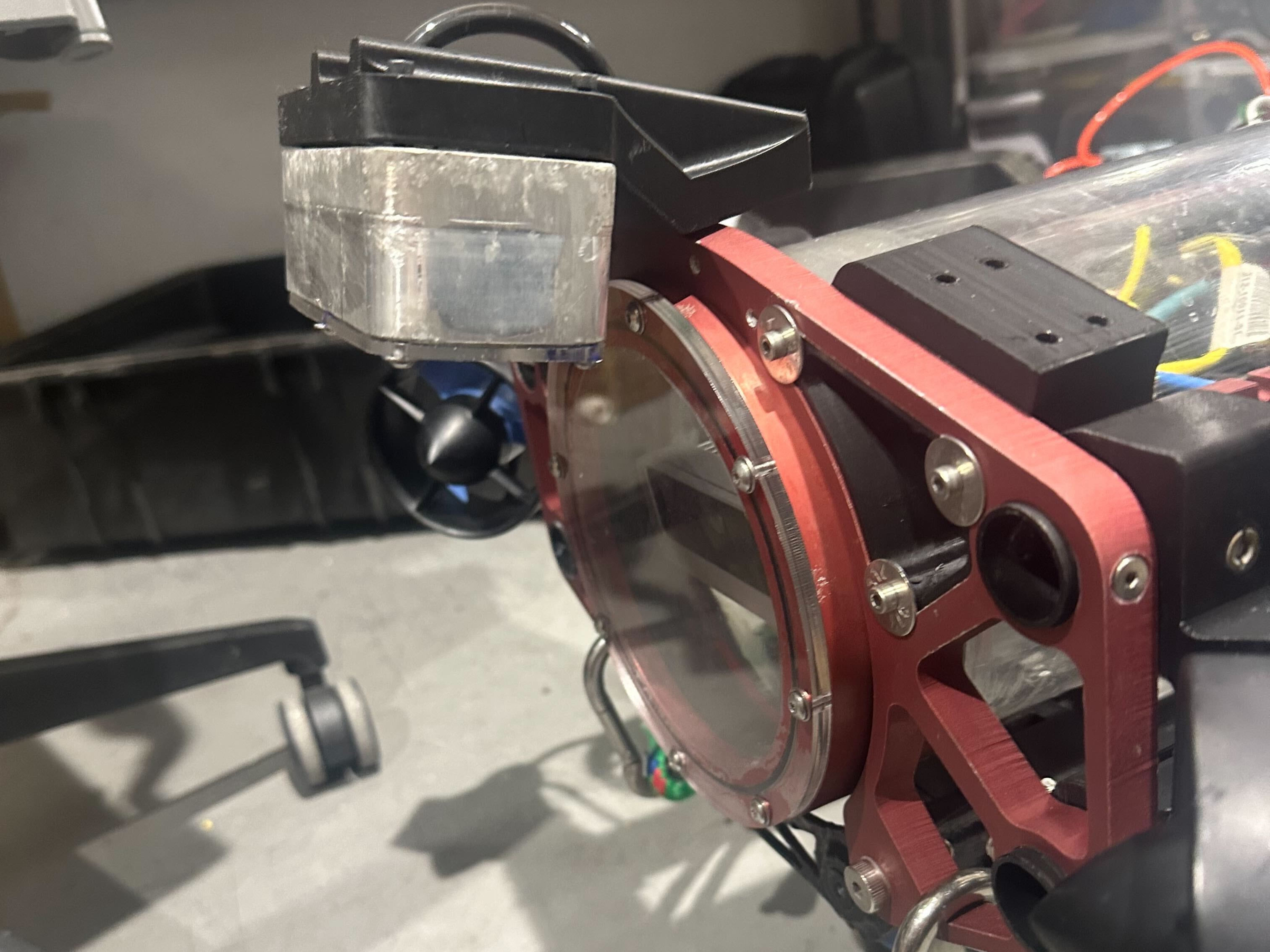
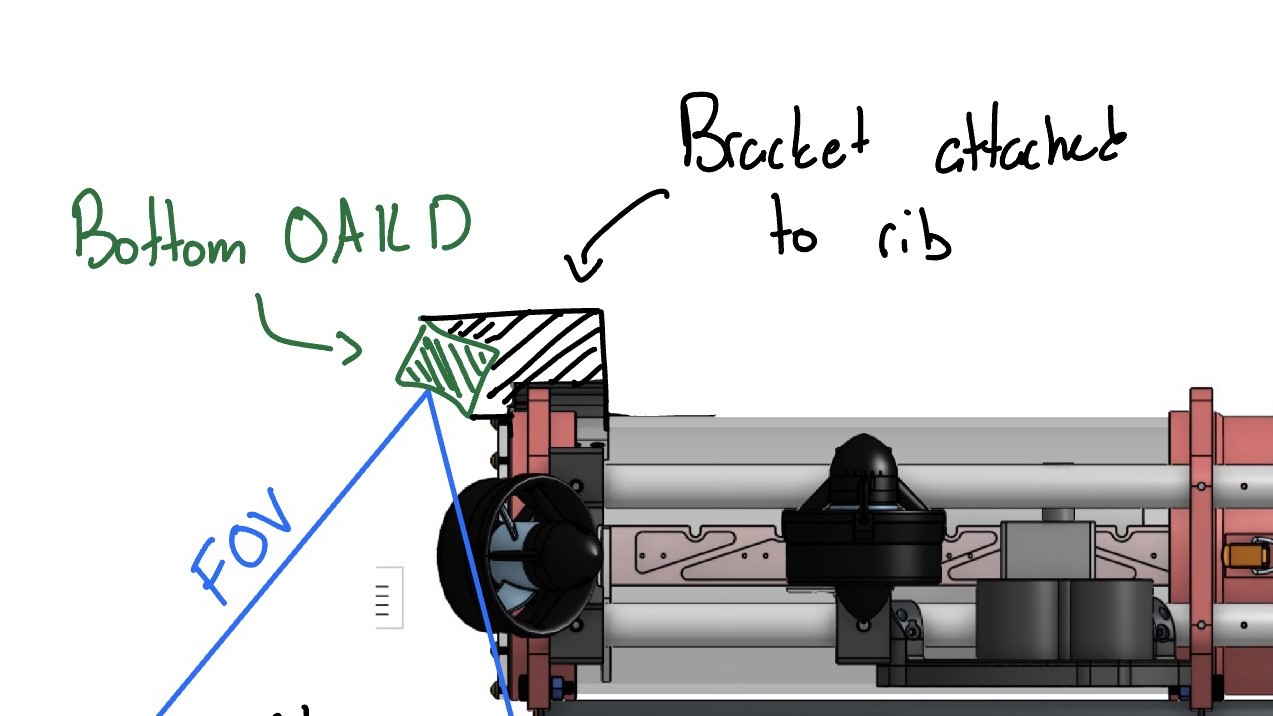
A new mount was needed for the bottom-facing OAK-D Poe camera on the sub such that we would have clear vision of any forward-facing manipulators we may put onto the robot, without interfering with the front facing camera's FOV. This mount features a cantilever design such that it is mounted to the sub frame off to the side, while holding the camera steady above the middle front. The current iteration of this mount attached to our sub is made out of PLA, but will likely be remade in nylon in the future for increased rigidity.

October 19, 2023
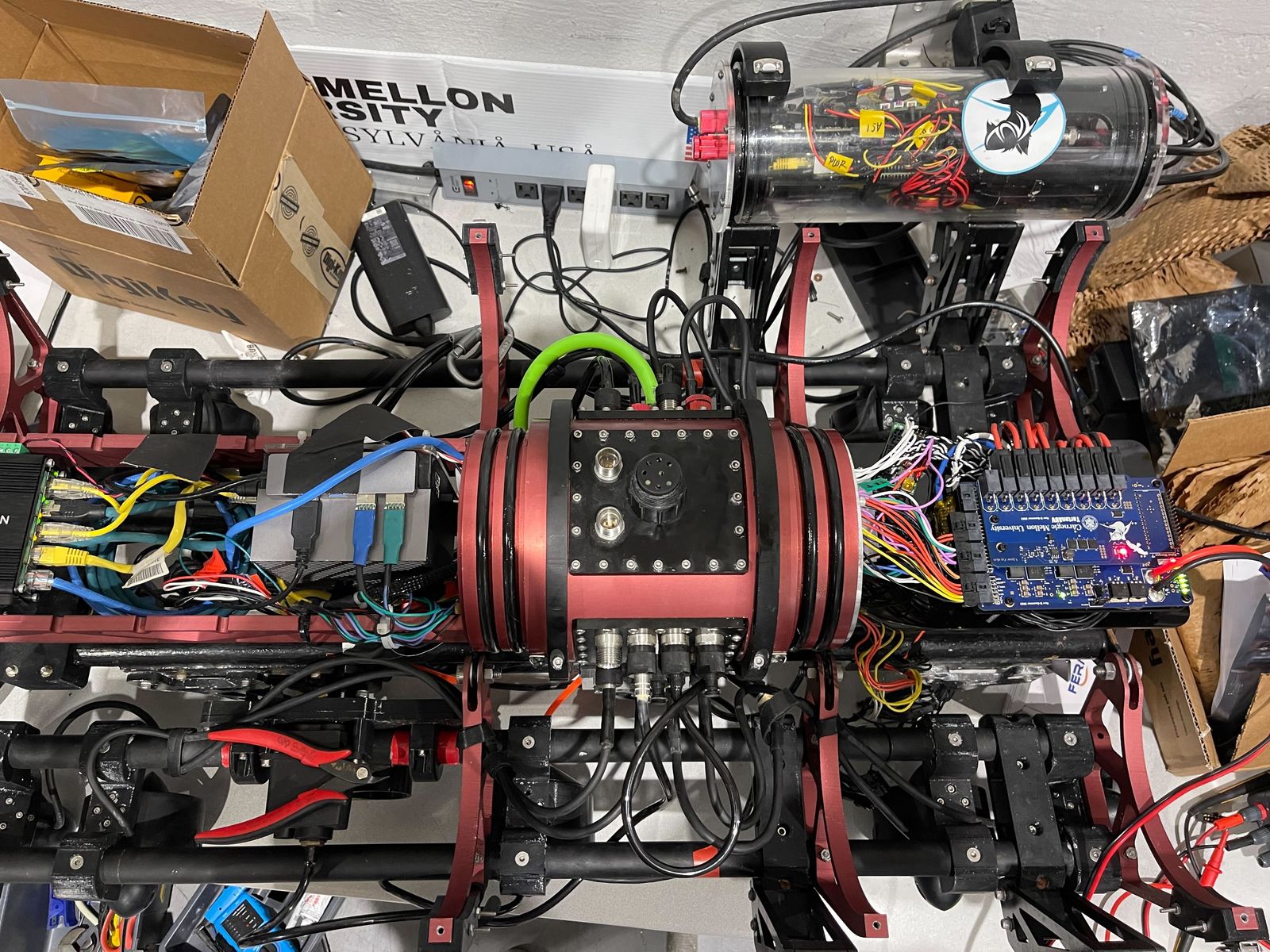
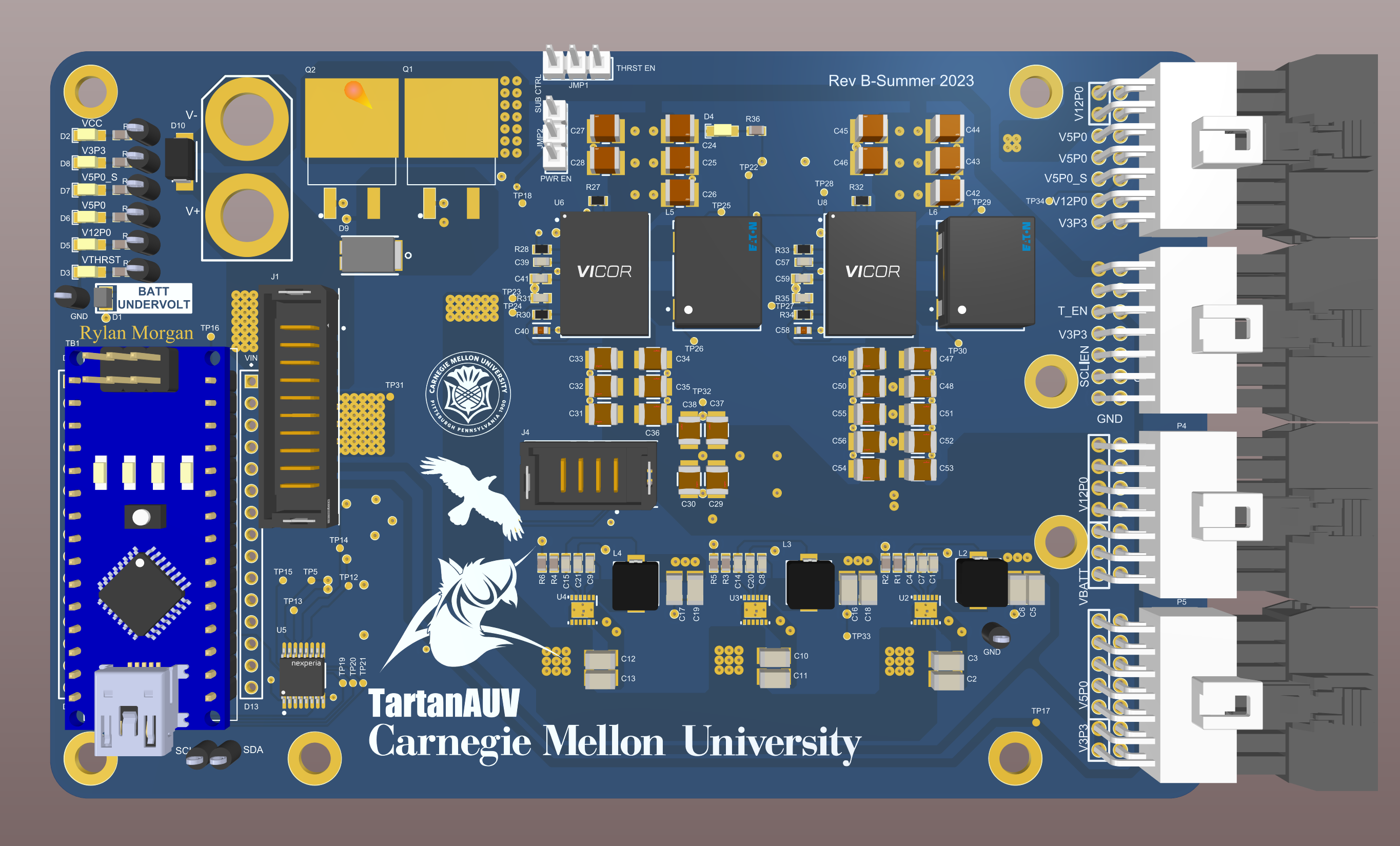
The next revision of the power stack is in and working well. A huge thanks to PCBway for sponsoring this round of production and doing such an amazing job on the assembly of these boards, they look awesome. In doing some testing, the 12V line is able to supply more than 100W for a sustained load but it seems as though some of the components get toasty under load. Overall though, the new stack is a big step up from previous power solutions and will allow us to have more information available during testing.
Future considerations: The electrical and mechanical teams will look into solutions to help keep thermals under control in extreme situations. These solutions will drive our future vehicle designs to maximize runtime by reducing thermal timeout. Additionally, to further these efforts, we will make changes to Rev C for even more thermal design considerations.
June 22, 2023
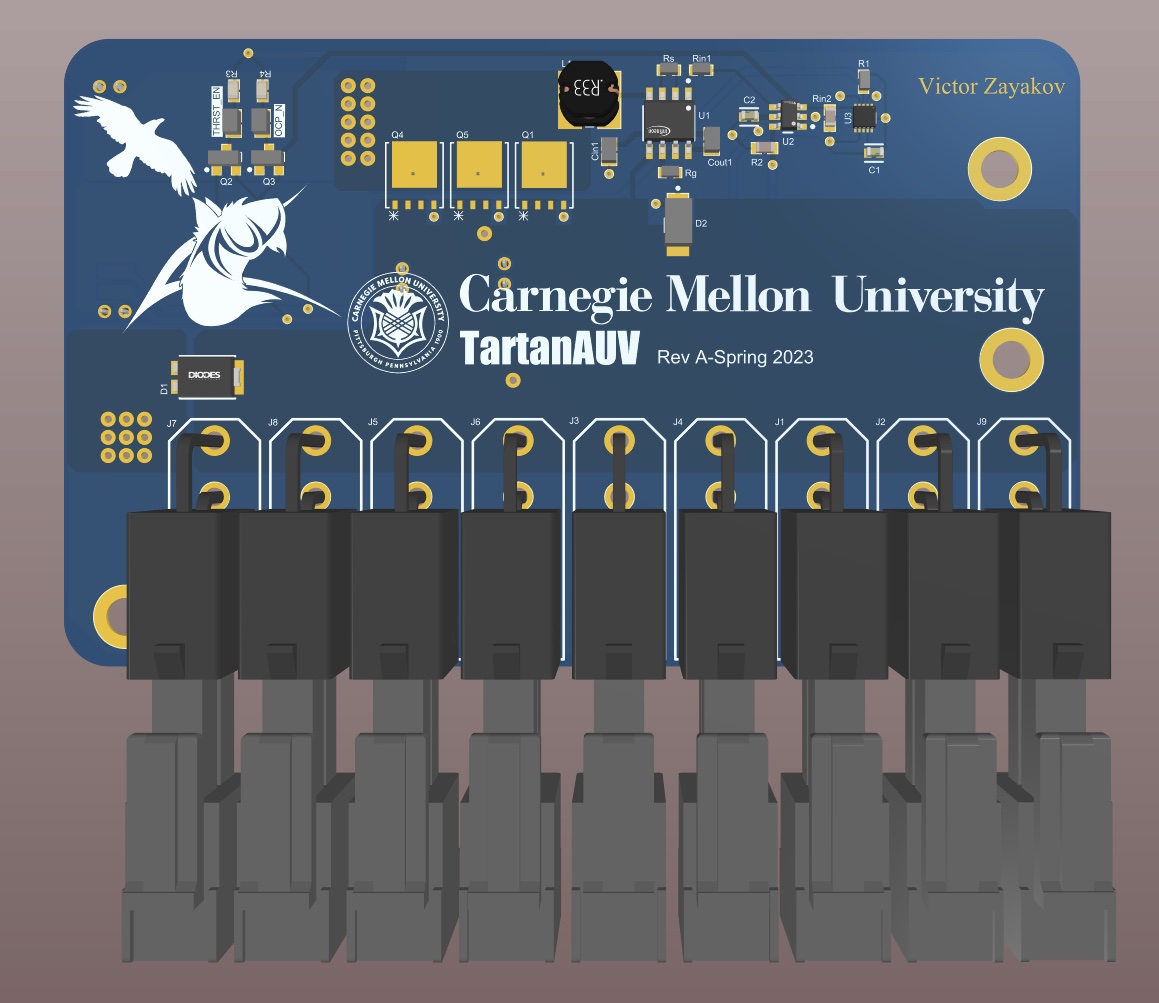
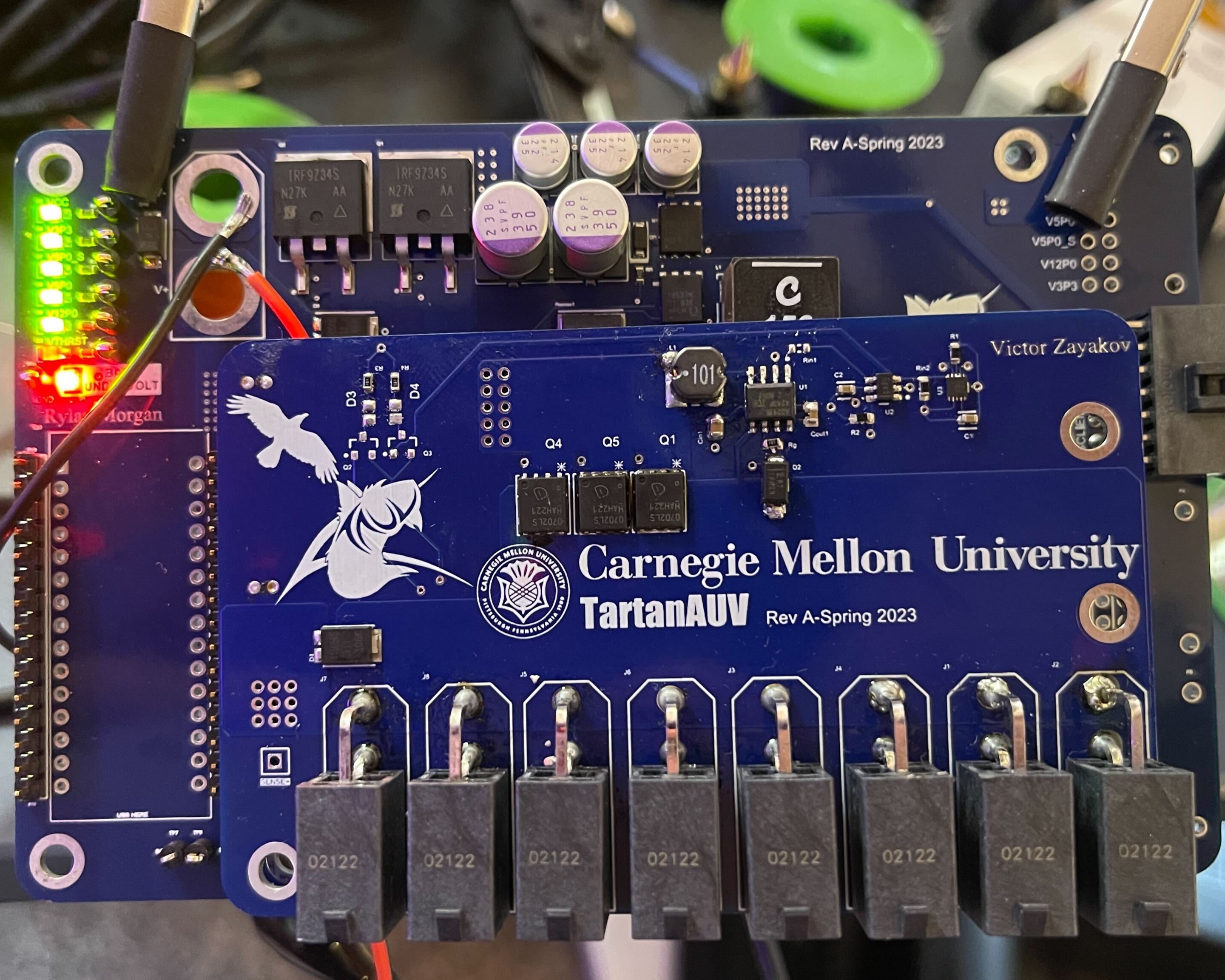
The problem: overheating thruster MOSFETS One of the biggest issues with the old power board was that it couldn’t handle the high current (up to 40A) supplied to the thruster motors - the MOSFETs would regularly overheat, leaving Kingfisher without any thruster power. We are designing a new thruster power board to handle these currents, with large copper pours and 2 Oz thick layers to dissipate the heat. The old MOSFETs have also been swapped out for newer ones by Infineon that can handle higher currents. The board also includes an upgraded Infineon gate driver, allowing for faster switching, as well as an extra power connector that allows us to power a 9th thruster.
Improved modularity with inter-board connection: Unlike our previous setup, the new thruster board is separate from the regulated power board. A pair of Samtec inter-board connectors let the two boards interface with each other, and hold them in place. This makes our system more modular and thus easier to maintain, since any issues with the thruster board can be addressed without modifying the main board. Also, given the much lower BOM cost of the thruster board, we could have multiple thruster boards ready-to-use and swap them out during competition, if any issues arise with the MOSFETs.
June 22, 2023
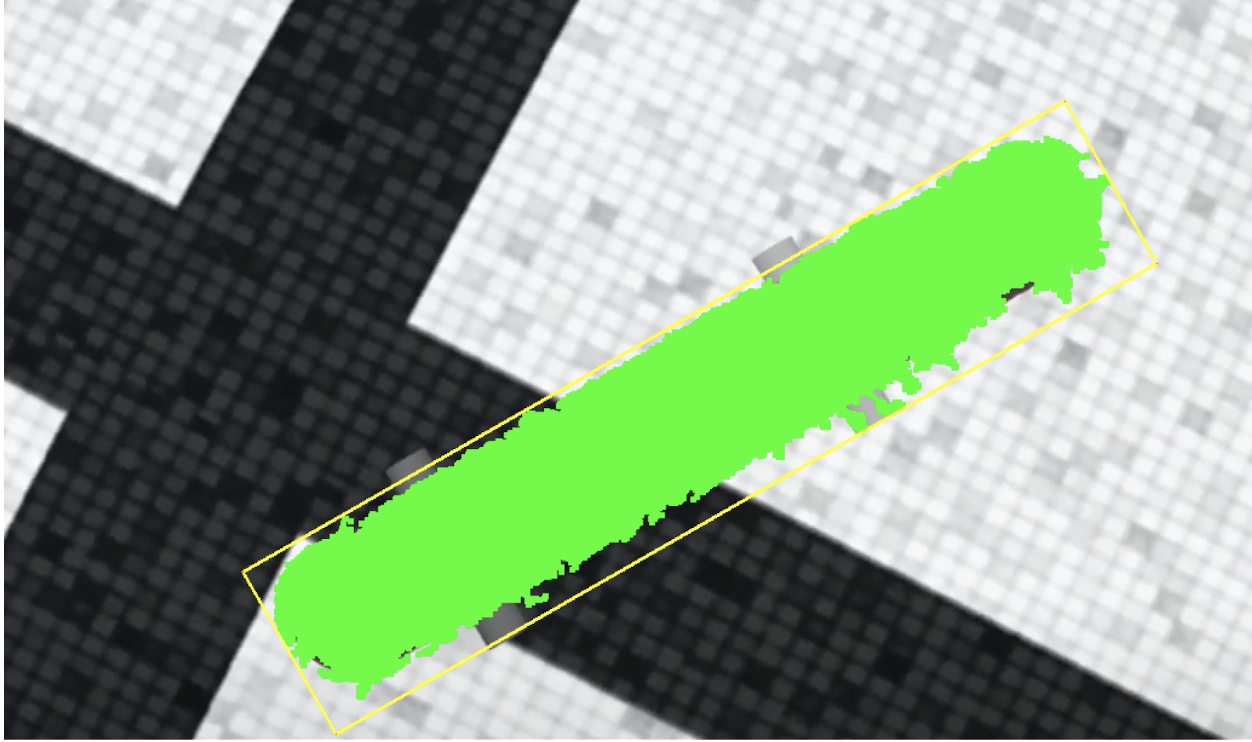
The problem: Path markers, which are long, orange boards placed on the pool bottom during competition, point in the direction of the next task at the end of a completed one. This comes especially handy in environments like TRANSDEC, where darkness may obscure our submarine’s ability to navigate around the pool. Yet, path markers can only can be helpful if our submarine is able to detect them and recognize which direction they are pointing. We modeled this situation by developing Blender models of these path markers and generating virtual footage of what our submarine might see during competition as seen below.
Computer vision to the rescue: Now that we know what kind of footage we can expect to see from our submarine, we can apply computer vision approaches to detect the marker and move in the correct direction. Specifically, we take advantage of the distinct orange color of the marker to first differentiate it with the rest of the frame. Once we identify the rough orientation of the path marker, we find what direction to travel by mapping points on our detected marker to the internal map of the submarine. This allows submarine to add to its internal map and efficiently travel to the next challenge.
June 22, 2023
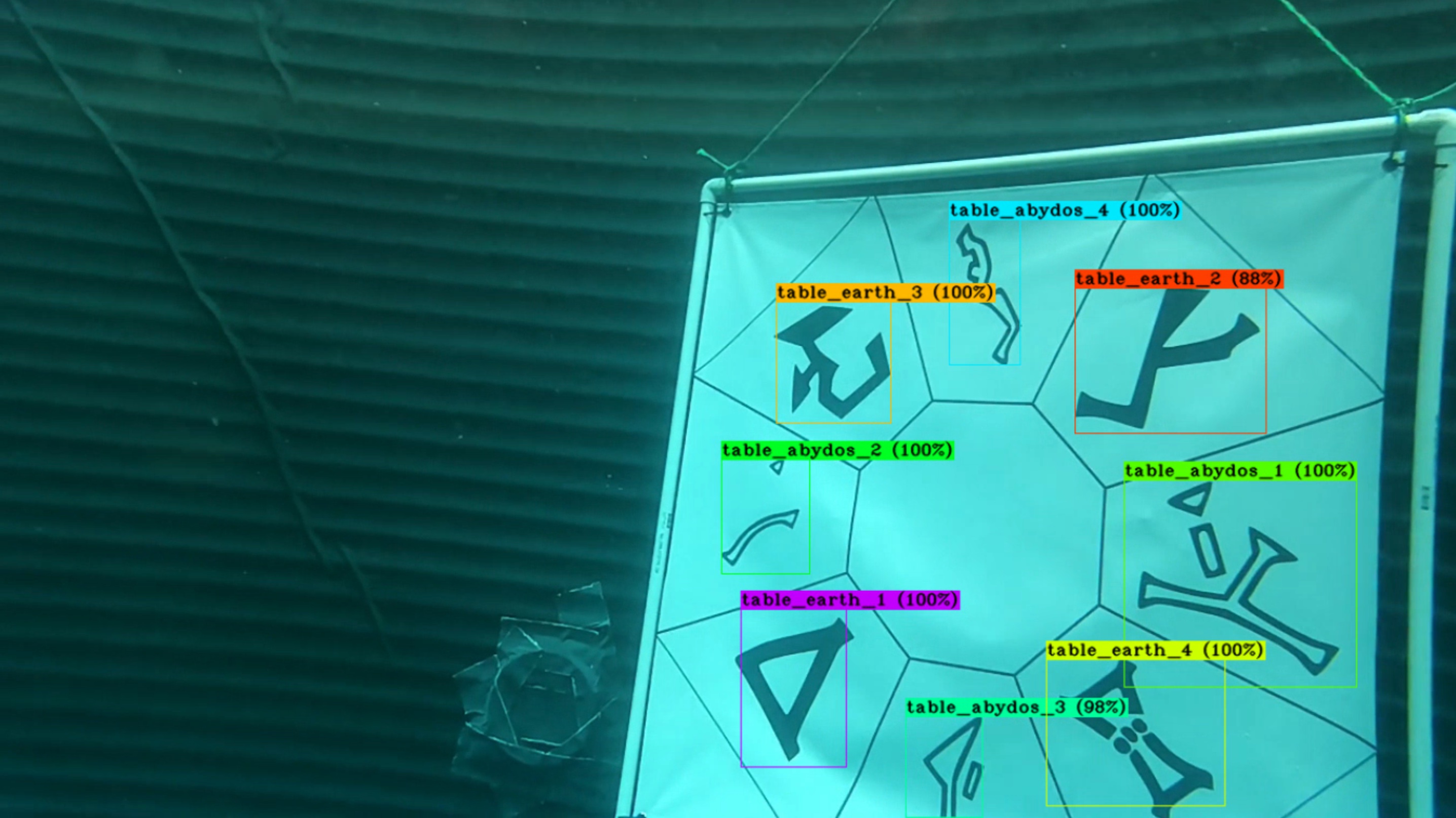
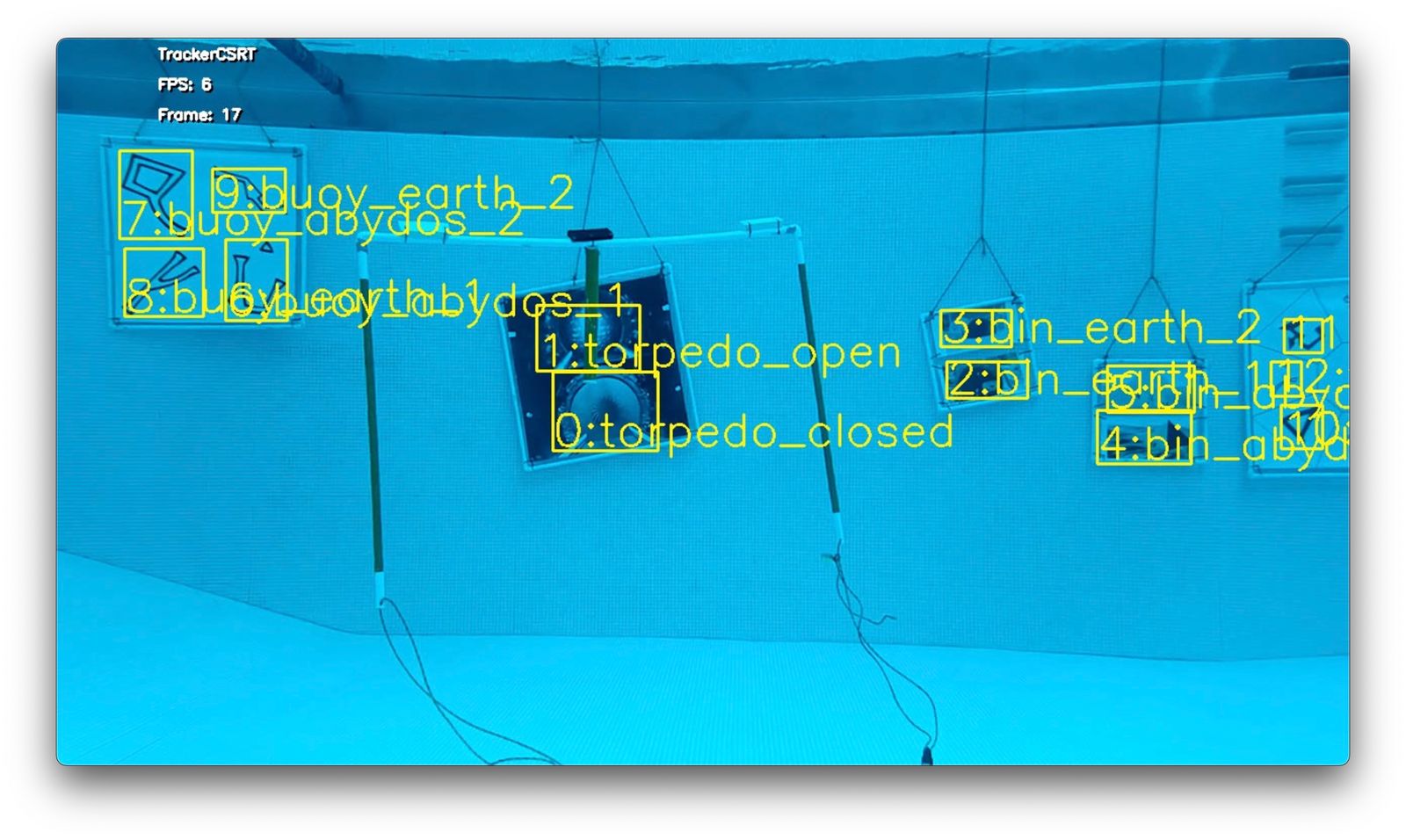
Kingfisher has spent some time in the water at CMU’s University Center swimming pool and Robotics Institute water tank collecting lots of video footage of game pieces. After annotating these videos with labeled bounding boxes, we were ready to start training our YOLOv3 CNN for object detection. Using an Amazon EC2 instance with 4 GPUs to help speed up the process, we trained the network to identify images found on buoys, torpedo targets, chevron tables, and bins. Testing the weights with Kingfisher back in the water, we can identify the targets with almost 100% certainty!
June 22, 2023
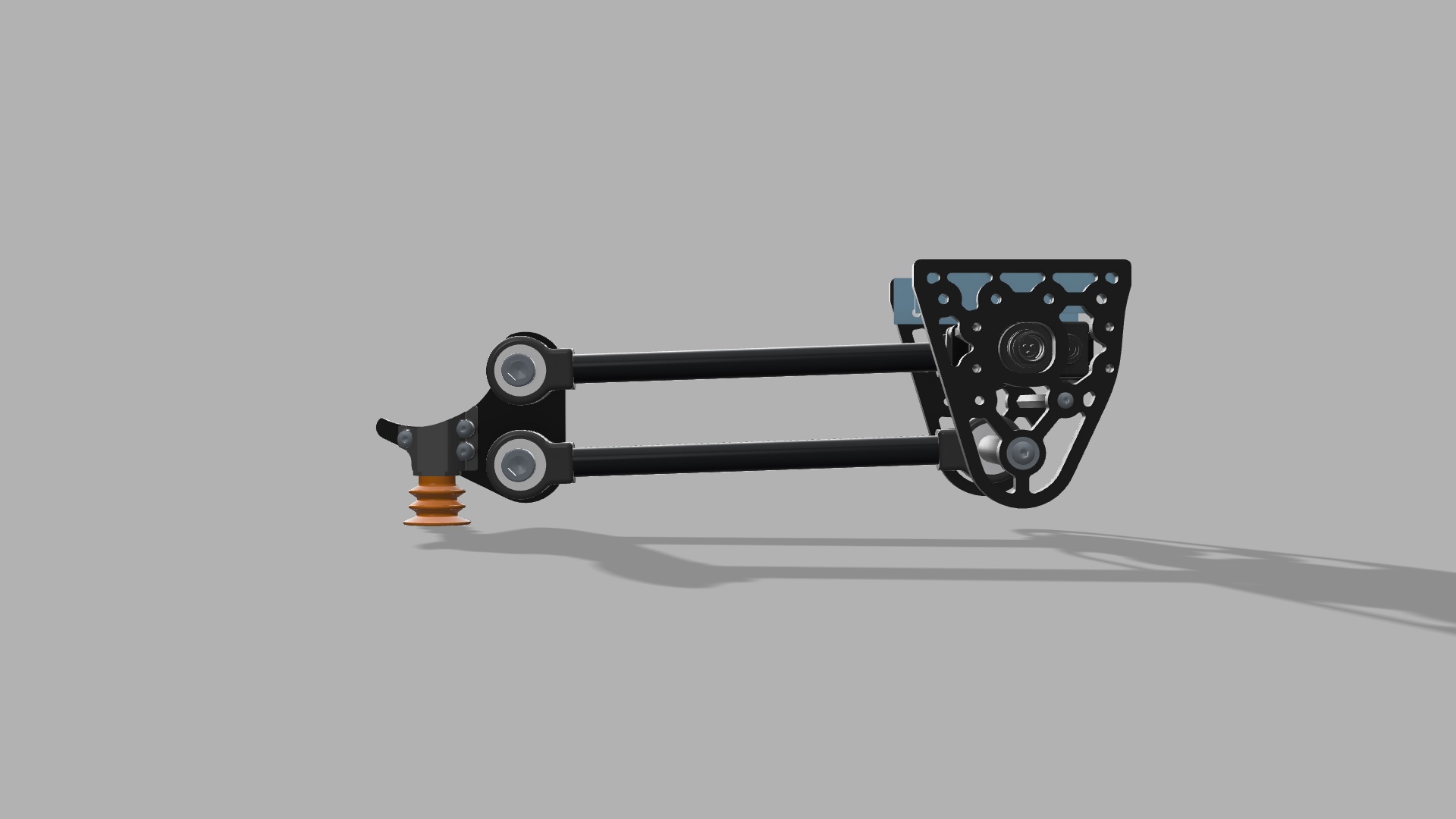
The flat chevrons of this year are extremely difficult to manipulate with a standard claw-style gripper. Thus, the team has decided to make use of an underwater suction cup. Creating a rotary pump from a Blue Trail T200 thruster and a 3D-printed shell, we are able to create a continuous pressure differential and a strong suction force on the chevrons, allowing for easy manipulation. The key advantage for this over a standard underwater suction cup is the ability to use a bellowed suction cup as our end effector. This means that when we're approaching the chevron, we have about a 30 degree range of orientations normal to the surface in which we are able to still maintain full suction on the chevron.
June 20, 2023
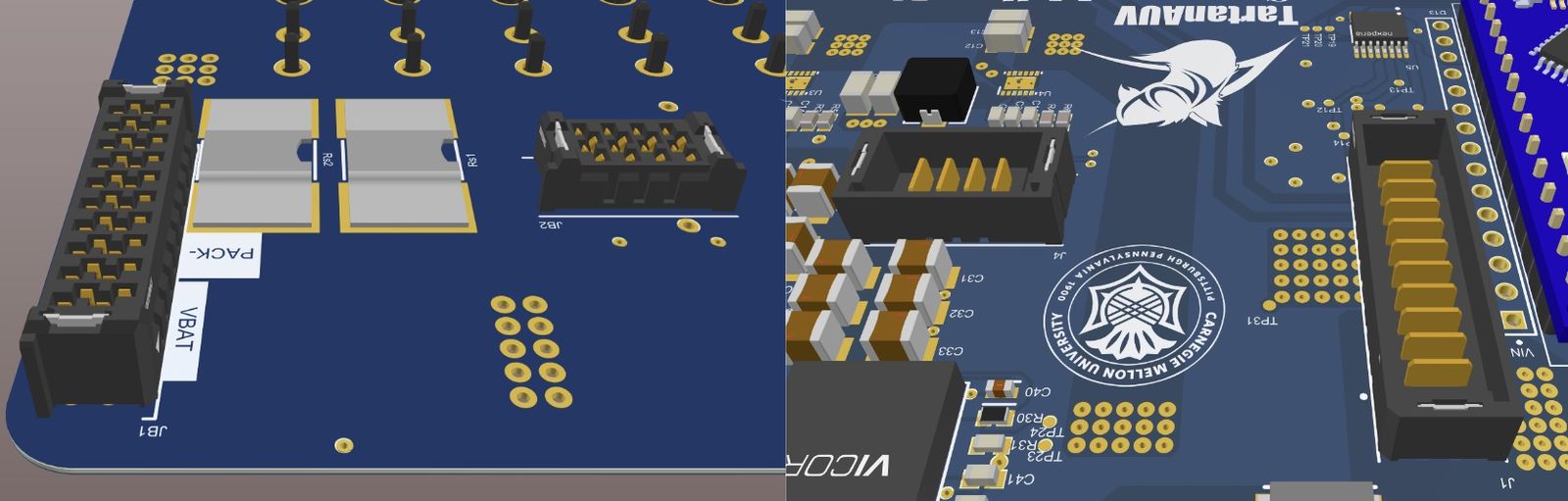
New V12Po Regulator circuit: The first rev's PMIC has been extremely problematic and issues are still ongoing. The plan is to swap over to a chip from Vicor which has no external mosfet requirements. While the peak output current is not capable of meeting our requirements on its own, the chip can be placed in parallel operation to improve current capacity. This will also help reduce BOM cost and simplicity as one circuit can be DNP'd in the event we do not need the full current capacity.
Quality of life upgrades: We are sticking with an Arduino for our onboard microprocessor until the basic layout and features are met. To improve the I/O available, analog multiplexers are being used for sense lines to connect 8 inputs to one pin. Other improvements include jumpers to easily toggle power on and off for the board without the need for external hardware like the key or thruster kill switch. Finally, the silkscreen is being modified to make readability and debugging easier.

