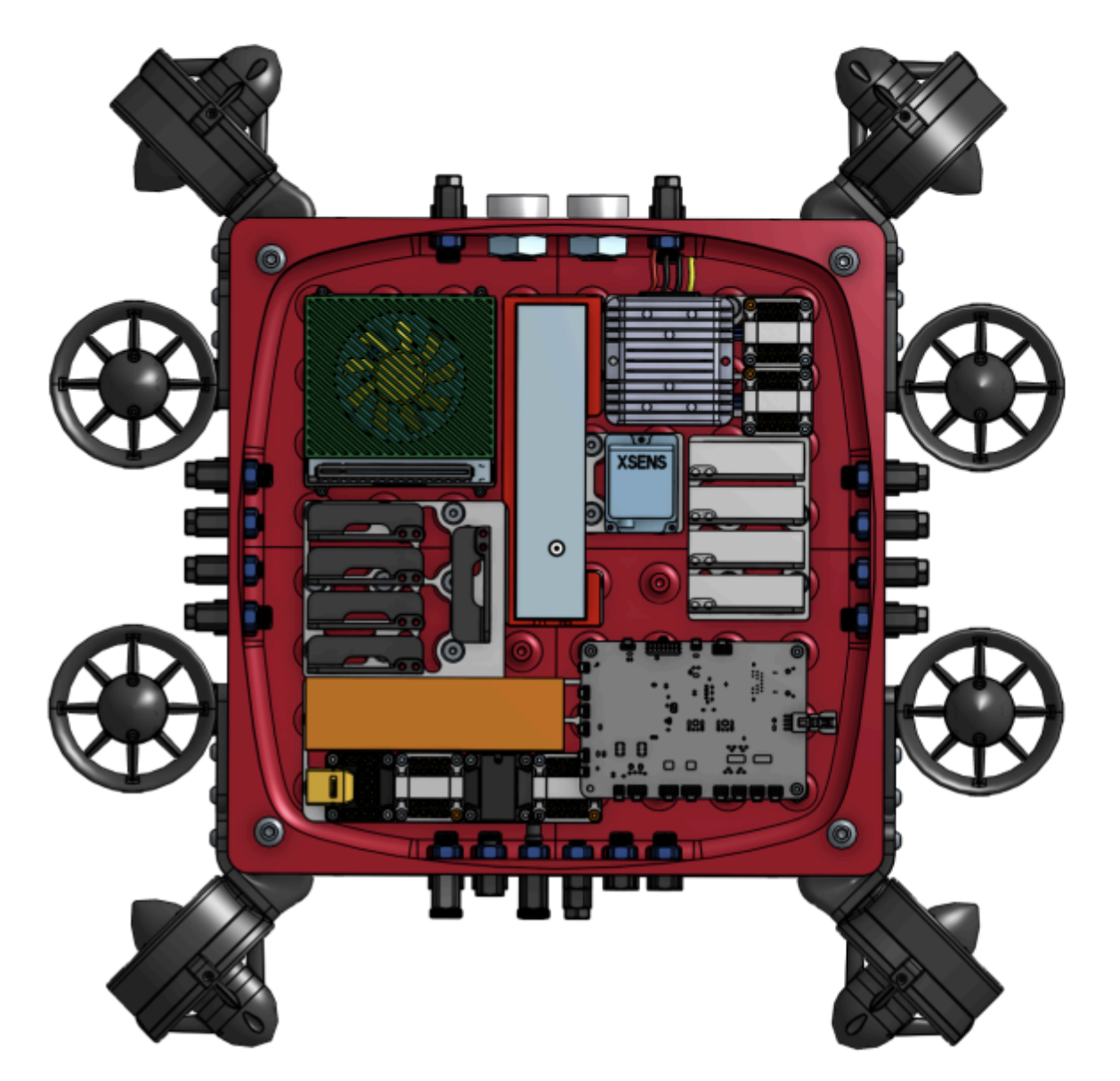
Goal: Maximize ease of access to internal components
Solution: Square enclosure with 8 by 8 grid of raised mounting points
Implementation: This square design allows us to place modular plates in a nearly infinite number of configurations of internal hardware. This constitutes a tremendous advantage over the tube design used on our previous AUVs, which required highly customized mounts and custom components
to be volume-efficient. The raised grid raises all the electronics up from the lowest point in the unlikely event of leakage. It also allows for efficient wire management underneath the bulk of the electronics, where strategic lightening pockets on mounting plates can double as effective tie-down
points.

Goal: Prevent leakage
Solution: Pressurizing our vehicle
Implementation: Before Osprey goes into the water, we pressurize the hull to 8–10 psi. This allows bubbles to escape from any potential leak point, giving us ample time to detect and address issues before water enters the vehicle. The tree-like support structures on the lid are designed to withstand external pressure. Manufactured entirely in-house, the lid’s weight was optimized using generative design to minimize mass.
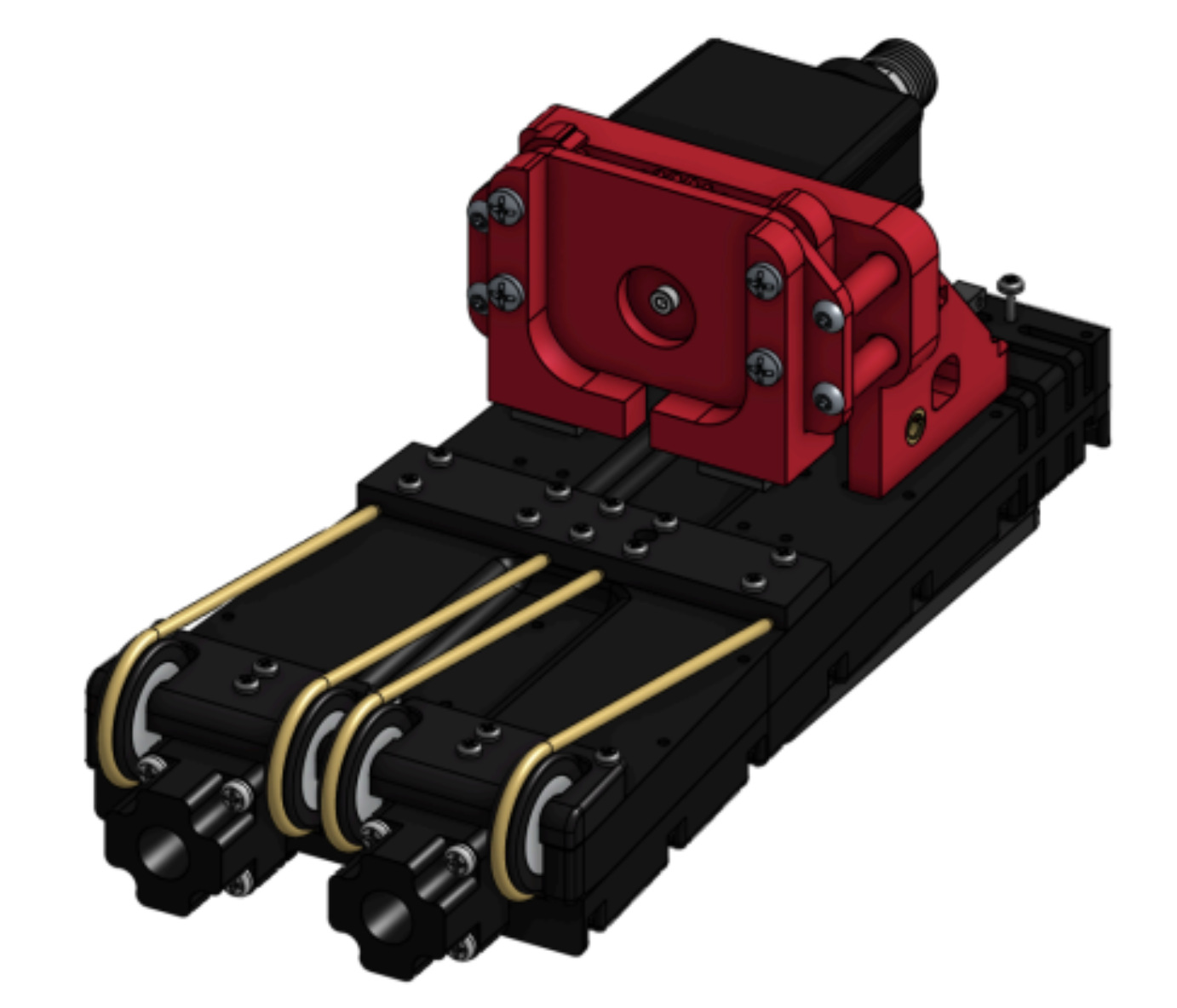
Goal: Impart maximum potential energy into torpedo in a singular direction
Solution: Latex tubing stored away from the path of fire
Implementation: We designed our new torpedo launcher to be inspired by a roller speargun. This design utilizes latex tubing stored away from the path of the projectile, allowing force to be continuously applied to the torpedo while firing, while also storing the uncompressed segment outside of the path of fire. This design allows us to impart maximum energy into the projectile in a singular direction. This greatly increases our accuracy by maximizing
the directional energy of the torpedo.

